ピーマンの自動収穫ロボットを開発しているAGRIST株式会社 高辻克海様よりお話を伺いました。ピーマンの吊り下げ式自動収穫ロボット部品をMJFで製造されている事例をご紹介いたします。

高辻克海様 プロフィール
北九州工業高等専門学校 電子制御工学科 卒業高専在学中は高専ロボコンに打ち込み、2015年から2018年まで4年連続で全国出場を経験。
ロボコン引退後は中国DJIが主催する国際的なロボットコンテストRoboMasterへの出場経験もある。
高専卒業後はロボット競技で築き上げた技術を活かし、日本の農業課題をロボットで解決するためにAGRISTへ参画。現在はメカ設計エンジニアとしてロボット開発に従事している。

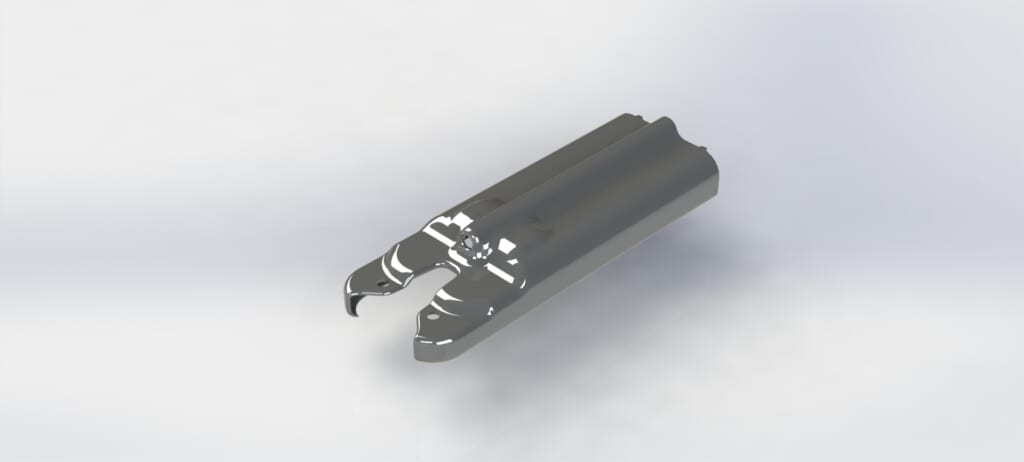
ロボットハンドは薄さと強度が必要で、コストが安く、造形で失敗しないことを求めていた。

DMM.make3DプリントサービスのMJFだと、薄くて強度があり、低コストで、造形で失敗がない。

DMM.makeでは、ウェブサイト上でダイレクトに3Dモデルをアップロードして、直感的な操作で材料を選ぶことができました。
扱いやすさがダントツだったのでDMM.makeを活用させてもらっています。
会社概要と担当の業務内容について
本日はよろしくお願いいたします。
会社概要と担当されているお仕事の内容から教えていただけますでしょうか。
AGRISTはピーマンの自動収穫ロボットを開発しています。
創業当初はピーマン収穫ロボットの開発がメインでしたが、すべての農業環境に適応するロボットを作ることはとても困難かつ、コストがかかってしまいます。
そのため、現在では自社で農業にも着手しており、ロボットが最もパフォーマンスを出せる環境の開発も行っています。
僕自身はメカ設計エンジニアとして、ロボットのメカ部分の設計や作を主な業務として担当しております。
ありがとうございます。
3Dプリンターによる造形物は自動収穫ロボットの開発に使われているのでしょうか。
本体の中に組み込む形で使用しています。
開発用途での使用がメインになります。一部、カバー関係は初期ロットの製品にも搭載予定です。

3Dプリンターの活用方法
3Dプリンターで実際に作られている部品は、自動収穫ロボットのどの部分で活用されているのでしょうか。
主にロボットのカバー関係で活用しています。
ピーマンを収穫するためのロボットのハンド部分で、先端の色合いが変わっている部分でDMMさんに発注したものを活用しています。
それ以外の部分にも3Dプリント自体は使っています。
自社の小さめの3Dプリンターで造形したものに表面処理を施して、塗装してから使用していますね。
ありがとうございます。
DMMで造形した素材は何が使われているのでしょうか。
ベルトコンベアのような部分でヘタをカットして、ピーマンをキャッチするようなイメージでしょうか。
ご認識いただいているとおりです。
自動収穫ロボットが実際に動作している動画があるので、ご覧いただいたほうがよりイメージしやすいかと思います。
自動収穫ロボットは、ハウス内のワイヤーに吊り下げる形で取り付けられています。
吊り下げる形で導入している理由は、一般的に農業の現場は地面がぬかるんでいたり物が落ちていたりして、地面を走らせることが難しいためです。
なるほど。
ロボットが地面を走行するイメージをしていたので、吊り下げられているのには驚きました。
ありがとうございます。
自動収穫ロボットで採ったピーマンは、コンテナに自動的に放出する形で、ロボット自体はバッテリー駆動です。
ロボットを操作するためのスイッチパネルがついていて、カバー部分をMJFで作っています。
パネル全体の黒い部分は、アクリルをレーザーカッターで加工したものです。
収穫するピーマンの判断基準は大きさなどでしょうか。
そうですね。収穫したいピーマンのサイズに合わせて、ロボットを設定する形にしています。
2台のカメラを搭載していて、画像データと赤外線の2種類を併用して収穫するピーマンの大きさや位置を判別しています。

製品開発のきっかけ
収穫するピーマンのサイズ感は、あまり大きくないものだとか、まだまだ育てたいなどの基準で判断されるのでしょうか。
ロボット本体に設定しているのは、S・M・Lサイズの3種類です。
現場の声を聞くと、実が大きくなったピーマンの木は、果実にエネルギーを吸われて元気がなくなってしまうので、大きくなりすぎた果実は早めに取ってしまいたいというニーズがあります。
出荷をする場合、重さ25〜40g程度のMサイズのピーマンが一番単価は良いので、出荷に適した大きさとされています。
この大きさを超えてしまうと、ピーマンの木の元気がなくなってしまう上に、出荷する際の単価も下がって負のスパイラルにハマってしまう…。
農家さんもこのサイズ感で出荷したいものの、人手では収穫が追いつかないので、ロボットで解決したいという想いから我々の会社はスタートしています。
なるほど。
自動収穫ロボットが導入されれば、仕分けなどの手作業も省けそうですね。
そういったメリットも当然ありますね。現状はロボット自体が収穫できる量は多くないです。
量でいうと、自動収穫ロボットを使うと1日で20kgほど収穫できる想定ですが、熟練のパートさんの場合100kg程度収穫します。
それと比べると、収穫量はまったく足りていないので、結局のところ、人の手による仕分け作業が必要になります。
現時点では人の収穫作業をサポートするロボットです。
将来的には収穫だけでなく仕分け作業もロボットが行い、効率化できるのが理想ですが今はロボットの収穫量が多くないので、人が収穫したピーマンと合わせて仕分け作業を行うことを想定しています。
ありがとうございます。
現状は、そこを目指して開発を進められているのでしょうか。
将来的な目標としてはおっしゃるとおりです。
ロボットがすぐに人と同等、またはそれ以上の収穫量を確保できるかといわれると、いまの技術革新では難しいというのが正直なところです。
当面の間は、ロボットはあくまで道具として活用いただき、人の収穫作業をサポートするという部分に期待しています。
どういう部分に期待 されているのでしょうか。
農業の人手不足が叫ばれている中で、現場では収穫作業にかける時間が50%以上を占めています。
先ほど申し上げた木の元気がなくなってしまう話にも関連しますが、畑の面積が広くなるほど、収穫のスパンが1〜2週間ほど空いてしまいます。
その間に実が成長して大きくなってしまい、木の元気がなくなってしまうという悪循環が続いています。
自動収穫ロボットを導入すれば、同じハウス内をロボットが自動的に行ったり来たりするので、人の手が届かない期間中も大きくなりすぎた果実を収穫できます。
ロボットの収穫量自体は少なくても、木のメンテナンスを行うという意味であれば、十分に人間とロボットの差別化ができるのではないかと考えています。
メインの収穫にも期待しつつ、人の手が及ばない時間帯にロボットが木のメンテナンスをしてくれるのですね。
そうですね。
人が作業をしていない夜間帯の自動収穫ロボットの開発にも着手しています。
実装できれば、いままで作業していなかった時間帯の分だけ、純粋に収穫量をプラスできます。
人が休んでいる間に収穫量を増やせれば、かなり大きなメリットになりそうですね。
夜間帯の自動収穫は、照度が課題になるのでしょうか。
そうですね。現状はカメラの横にLEDライトを付けて、光をもとにして収穫する形を取っています。
夜間の映像から機械学習させることで、ピーマンの認識率を保ったまま、昼間と変わらないレベルでの収穫が可能です。
当然、夜ならではの課題もあるので、現状は課題を解決するための開発を行っている状況です。

3Dプリンター活用のきっかけ
AGRISTさんはロボット開発のスタートアップですが、最初から3Dプリンターの利用を前提で設計されていたのでしょうか。
創業当初は、自動収穫ロボットのピーマンを収穫するハンド部分のほぼすべてを3Dプリンターで造形しました。
他にも、機能試作のために活用していたので、3Dプリンターの使用頻度はかなり高かったですね。
いまはマシン全体をしっかりと作り込むために、金属パーツが多めの設計に変更しています。
前ほどの使用頻度ではありませんが、機械本体の役割を担うメインの部分ではなく、細かなパーツやカバーの造形などで活用していますね。
ありがとうございます。
御社でお持ちの3DプリンターとDMM.makeの造形サービスは、どのように使い分けられているのでしょうか。
理由は大きく分けて3つあります。
1つは品質ですね。先ほどのロボットハンド部分の先端は、薄さがかなり重要なポイントとなっています。
形状は薄くしつつ、ある程度の強度を保っているという状態のものを採用したいと考えています。
薄さにこだわられる理由はございますか?
ピーマンの木の中は、木や葉っぱですごく生い茂っているので、ピーマンをカットするハンド部分の入る隙間が非常に狭いです。
ハンドの大きさそのものをなるべく薄く小さくしたい場合に、AGRISTで導入したFDM方式の3Dプリンターでは出力するのが難しいという問題がありました。
表面のクオリティも良くて、キレイに仕上げてもらえるので、品質面を考慮してDMM.makeのMJFを採用させてもらいました。
FDMで薄く作ってしまうと、強度に不安が残りますよね。
2つ目の理由はコスト面です。
薄くてある程度の強度を保てる素材は他にもあるとは思うのですが、それらの中で比較して、安価で造形できることからMJFを選びましたね。
最後の3つ目は、リスクヘッジです。
AGRISTの3Dプリンターでサイズが大きなものをプリントすると、どうしても失敗する確率が 高いという課題がありました。
そういったリスクを踏まえると、DMMさんにお願いしたほうが良いという判断で利用させてもらいました。
コストを抑えるためにFDMを活用しつつ、要所要所の大事な部分で、失敗リスクやコストを鑑みた上でMJFをお選びいただいたんですね。

DMM.makeを選んだきっかけ
3Dプリンターの造形サービスの中でDMM.makeを選んだきっかけは何だったのでしょうか。
正直、事前にいろいろと比較検討したかといわれるとそうではありません。
3Dプリンターの造形サービスがあることは人づてに聞いていたので、DMM.makeの存在自体は前々から知っていました。
他社も含めていくつか拝見した中で、ウェブサイトのUIがわかりやすくて、一番扱いやすかったのでDMM.makeを選びましたね。
他社さんだと、オンラインで3Dモデルをアップロードしても、結果的にメールでのやり取りが多いですよね。
DMM.makeでは、ウェブサイト上でダイレクトに3Dモデルをアップロードして、直感的な操作で材料を選べました。
扱いやすさがダントツだったのでDMM.makeを活用させてもらっています。
ありがとうございます。
すでに3Dプリンターを導入されている上で、DMM.makeの造形サービスを利用する際に社内的なハードルなどはありませんでしたか?
我々は創業してから3年ほどしか経っていないベンチャー企業で、社員数もそこまで多くありません。
「使えるものはどんどん使っていこう」という考え方でやっているので、そういう意味でハードルは高くなかったですね。
もちろん、最初に注文するときはそれなりの金額が必要なので、どんなものが届けられるかわからないという不安はありましたけども。
人数が少ないベンチャーだからこそ、意思決定が早くできたというところですね。
ご注文いただく頻度はどれくらいでしょうか。
今年の実績だと、数か月に1回くらいの頻度で、まとめて注文するような状況でした。
一年の中でロボットを複数台まとめて作るタイミングが何度かあり、台数に合わせてまとめて発注するような形です。
DMM.makeを使い続けている理由や今後の展望について
MJFにご期待いただいて選ばれたかと思いますが、DMM.makeを使い続けている理由は何かございますか?
大きな理由としては、製品の品質に満足している点です。不満がないというのは非常に大きいポイントです。
何度も頼むうちに品質が安定しなかったり、クオリティが微妙だったりすれば、他社に乗り換えることもあったと思います。
DMM.makeさんは非常に安定しているので、我々としては変更する理由が見当たらないというところですね。
ありがとうございます。
3Dプリンターを使って開発する中で、他の部品としても使えそうな部分はありそうでしょうか。
いまはピーマンの自動収穫ロボットとは別に、キュウリの自動収穫ロボットも開発中です。
基本的な形はピーマンのロボットとほぼ同じなので、大部分は流用する形で開発を進めています。
キュウリの自動収穫ロボットはピーマンのほうに比べて1年遅れで開発していて、将来的に外装やカバー関係にこだわりたいという話になれば、新しい形で3Dプリント製品を依頼する可能性はあると思っています。

では本日は終了とさせていただきます。
お時間をいただきましてありがとうございました。
ありがとうございました。
AGRIST株式会社 /AGRIST Inc.
ホームページ https://agrist.com/